
Part 1 of this series.
Part 2 of this series.
“Tensegrity in this sense is an applied principle– a map of the nature of structure.” In my opinion, this is right in line with Gary Ward and his Flow Motion Model, which provides a map to human structure and movement. As bones/struts change position, the prestressed form adapts, responds and reacts with the best information it is provided. The tension wires also respond to the information that is provided to the brain, pushing and pulling towards and away from center. It is not so much a structural system necessarily, but a vantage to see the body’s most efficient organizational pattern, “in terms of most economical use of energy and material,” and the “economy of function” to quote Dr. Stone. Viewing and understanding these pushes and pulls allow us to view the vectors of stress and equilibrium.
“Individual tensegrities are integral– all parts are connected in a non–hierarchical relationship.” Flemons explores several misnomers about Tensegrity, dispelling several classic examples that have been passed down through bodywork lineages. One he mentions is the image of a mast of an old wooden ship or sailboat (previously pictured). I still think is a good analogy for the neck, but his point is the mast is fixed to the deck of the boat. The boat itself does not rely on the mast for its integrity. This model and understanding of “all parts are connected in a non-hierarchical relationship” dispels the suspension bridge analogy as a true tensegrity, as well as, the spider web. I then remembered learning in myofascial release class the image of the old knitted sweater, and how this image also does not serve as a true tensegrity model.
I do find and feel that there are hierarchical relationships within the brain (to be discussed much later under “Precedence”). For example, a limb is not as important as the lungs to the brain or even the digestive tract. I can live without a limb. Could I live without my lungs? How much intestine can I remove? However, in terms of structure, that pinky toe is no less important than your sacrum. Altering, removing, or damaging any one of those pieces impacts the whole triangulation of the entire body.
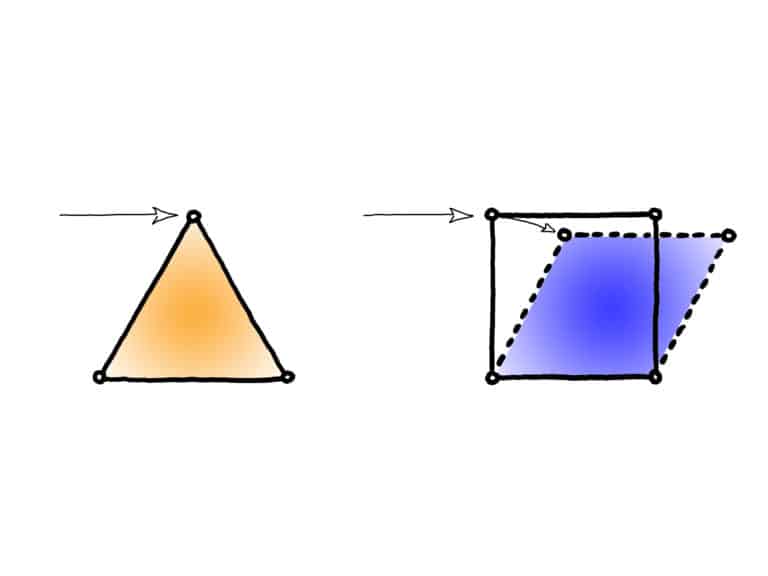
So, we circle back to triangles. “The only way to fully stabilize and constrain any structure is by triangulating surfaces or cavities in compression and/or tension in all three dimensions.” Almost as didactic as Buckminster Fuller saying, “the triangle is the only structure.” -Synergetics However, back to the image of the straws with a string, it is the only geometric figure that works in compression and tension. Therefore, it is the perfect structure and anchoring of dysfunction / means of balancing that the body can utilize, and does so all throughout the body! Ad infinitum.
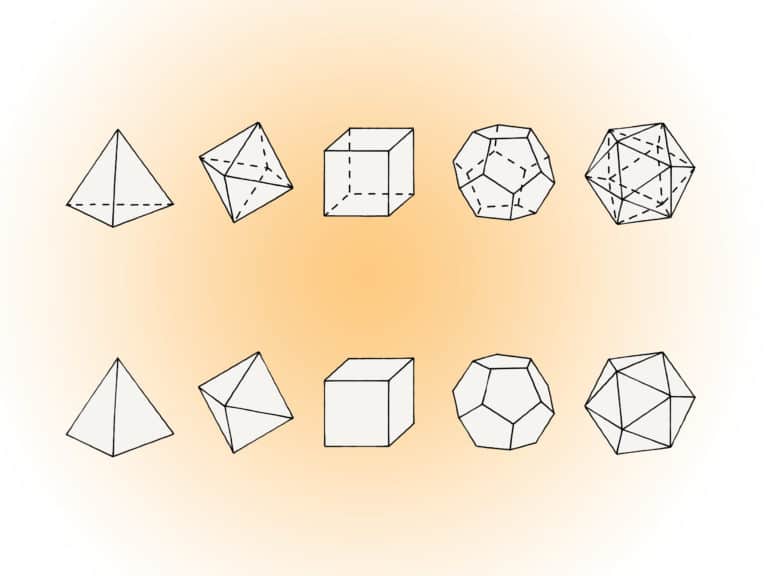
The body accomplishes this through the use of Platonic Solids. Of the five, three are triangulated polyhedra: tetrahedron, octahedron, and icosahedron. We are in a continual state of flux and movement. Even at our stillest of moments, we are arguably hurtling through space at thirty kilometers per second, or 67,000 miles per hour. Thus, there are continual ebb and flows throughout that the body balances, or as Flemons states, “clockwise and counterclockwise rotations of compression and tension that additively cancel each other out to guarantee stability.” (simply beautiful nerdy anatomical deliciousness)
By then studying these shapes, one can begin to understand the stresses and forces that act upon the human form. However, living structures are not still, not planar, nor are they perfectly symmetrical. We as humans have tendencies (left versus right hands for example) and repetitive patterns that lead us towards slightly altered asymmetries. This is a caveat statement to allow space and room for some degrees of freedom and asymmetry despite the beauties of symmetry.
“In living structure, stability is paired with mobility and objects that are adapted to allow movement possess degrees of freedom and are not fully triangulated,” writes Flemons. He continues to say, “Degrees of freedom refer to the number of different ways in which a rigid object can move in three dimensions (six). They are: movement up and down (heaving), movement left and right (swaying), movement forward and backward (surging), angling up and down (pitching), turning left and right (yawing) and tilting side to side (rolling).” I love this explanation so much, and view it as an explanation of how I was taught joint mobilization. However, I was taught eight directions, as heaving and pitching are similar and swaying and yawing as well. So we actually have eight directions of joint movement: heaving, surging, swaying, and rolling.

Anyhow, understanding all of these directions is paramount to comprehending polarities and oppositions in structure. Antagonistic relationships of opposing vectors correlate in a symphony of movement through tension and compression to manifest balance. Balance is our propensity towards not falling over, and therefore the clever body does its best to find equilibrium. The entire system tends towards finding center, the idea of Vector Equilibrium.
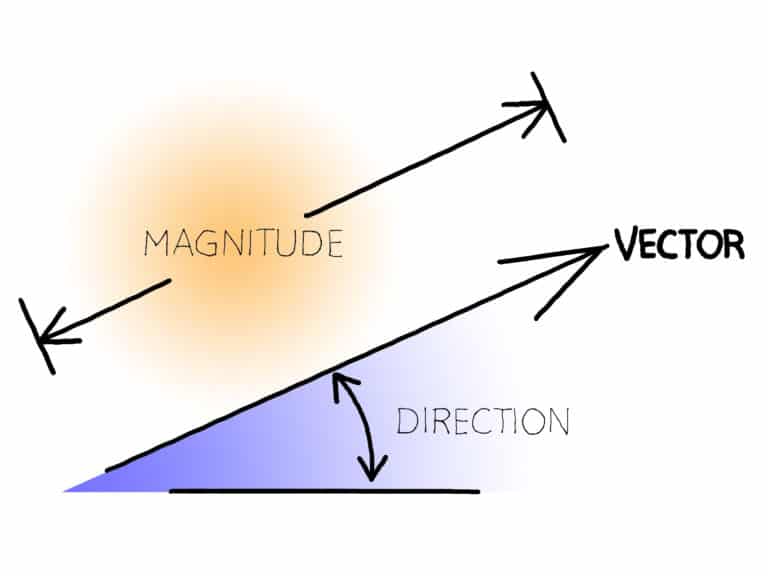 Vector is a quantity having direction as well as magnitude, especially as determining the position of one point in space relative to another. A vector is best represented by an arrow. The direction of the arrow is the same as that of the quantity, and the length is proportional to the quantity’s magnitude. Vectors become extremely useful for viewing and diagramming human structure, and are extremely useful in touch therapy. (will come back to this)
Vector is a quantity having direction as well as magnitude, especially as determining the position of one point in space relative to another. A vector is best represented by an arrow. The direction of the arrow is the same as that of the quantity, and the length is proportional to the quantity’s magnitude. Vectors become extremely useful for viewing and diagramming human structure, and are extremely useful in touch therapy. (will come back to this)

Therefore, balance is the final equation of all vectors of the body. There is a continual pull of gravity on our bodies as we rest and move upon Earth. The concept of Vector Equilibrium differs from Absolute Equilibrium- “wherein all energetic radiation, gravitation, magnetism, tension, pressure, thought, feeling, etc resolves into a state of perfect and absolute equilibrium – zero differential and fluctuation.” This turns out to be near impossible in our physical world, and apparently not desirable as it beckons another discussion on stability and mobility.
Vector Equilibrium was defined by Buckminster Fuller in 1940. He defines it as vectors that are all the same in length to the center and around the circumference. I would add as it pertains to the human as, “a balancing of all vectors of force acting upon the body that keep the human being returning back towards center.” As long as we are upright, there is some sort of balance. However, as well demonstrated by Gary Ward through the use of force plates and his Anatomy in Motion- Finding Center course, this idea of center can vary as we lemniscate through life.
Typically, if we are close to actual center, we are balanced and comfortable in our bodies. The further that we stray from center, the further we move our Vector Equilibrium from Absolute Equilibrium, and the more likely there will be a signal to the brain that something is not right. This is often perceived through pain, strain or spasm. What a better way to communicate than through pain? Truly, it gets our attention, but once again, this is not a conversation about pain as there are enough of those discussions flying around the inter-webs and literature these days. For now, this is about structure.
For those unable to wait for the next installment, the article in its entirety can be found here.